
1999-2000 Robotic Biathlon
In the robotic biathlon competition, the contestants were required to shoot ping-pong balls at targets while traversing a track from start to finish. Each target was three ping-pong ball widths in diameter and located 1 meter from the track. The robots made use of IR sensors to detect lights mounted above the targets to lock in on the center of the target before firing. The track itself was made of a black line which the robots followed with IR emitters and detectors.
The biathlon track (shown above) was wired to a central computer. The start, finish and scoring by the referees were all taken care of by this system. The biathlon was treated as a double elimination tournament with a winners and losers bracket. Robots were ranked during time trials before the competition. The scoring was accomplished by deducting a portion of time for each target hit from the overall time required to complete the course.
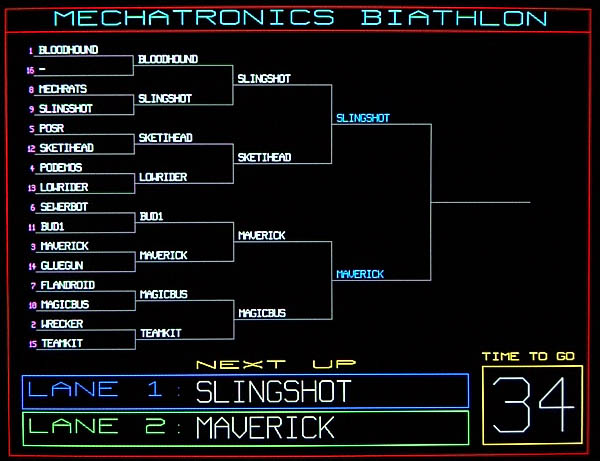
The two top place finishers were Slingshot and Maverick. They met once here in the finals of the winners bracket, then again in the championship race. Slingshot was fast, accurate and robust, allowing it to go undefeated throughout the competition, but Maverick more than once gave it a run for the money.
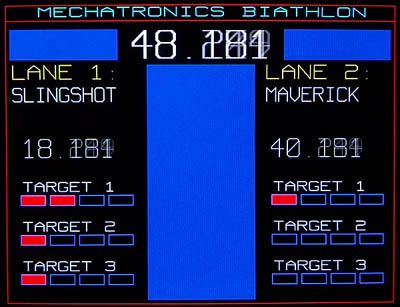
Slingshot hit the target at least once just about every time, and often hit twice. The robot incorporated a unique permi-launch tri-turret that was extremely accurate and robust. Here, Slingshot and Maverick go head to head, with Slingshot displaying a significantly reduced race time due to it's accurate ball launching and hits on targets.
Some of the mechatronics biathletes...
 Bloodhound had
a unique drive mechanism that both drove and steered the front wheel. The drive
mechanism allowed the team to move away from the inherent jittery motion often
seen in differential drive line following, and instead allowed it to smoothly
follow the contours of the course. The robot appeared to 'sniff' out the line
made of black tape that defined the track, thus the name Bloodhound.
Bloodhound had
a unique drive mechanism that both drove and steered the front wheel. The drive
mechanism allowed the team to move away from the inherent jittery motion often
seen in differential drive line following, and instead allowed it to smoothly
follow the contours of the course. The robot appeared to 'sniff' out the line
made of black tape that defined the track, thus the name Bloodhound.
 Podemos used a
track based differential drive to the maneuver through the biathlon couse. The
robot tracked extremely well and often traversed the course quickly but the
shooting mechanism encountered some problems during the competition.
Podemos used a
track based differential drive to the maneuver through the biathlon couse. The
robot tracked extremely well and often traversed the course quickly but the
shooting mechanism encountered some problems during the competition.
 Wrecker was a very
fast line follower, the fastest of the bunch. The robot was second only to
Bloodhound in the time trials held preceding the race, mainly due to the length
of time it took to stop and acquire the target being longer than that of
Bloodhound. This robot was especially zippy in the straightaway and extremely
entertaining to watch. Unfortunately the team encountered central processor
problems just hours before the beginning of the competition that hurt chances
for a high placed finish. Overall this was an impressive entry.
Wrecker was a very
fast line follower, the fastest of the bunch. The robot was second only to
Bloodhound in the time trials held preceding the race, mainly due to the length
of time it took to stop and acquire the target being longer than that of
Bloodhound. This robot was especially zippy in the straightaway and extremely
entertaining to watch. Unfortunately the team encountered central processor
problems just hours before the beginning of the competition that hurt chances
for a high placed finish. Overall this was an impressive entry.
 The Mechrats
robot used a unique forward based caster design with differential drive. This
design made for a very smooth line tracking motion. The robot incorporated a
sliding top tray mounted ball launcher. During the semi-finals of the
competition, the robot lost a good portion of its turret mechanism, but finished
anyway by dragging it behind attached only by the control wires as it crossed
the finish line, upsetting Flandroid and moving on to the finals against the
venerable Maverick. The team finished in 3rd place overall, losing only to
Maverick and the undefeated phenom known as Slingshot.
The Mechrats
robot used a unique forward based caster design with differential drive. This
design made for a very smooth line tracking motion. The robot incorporated a
sliding top tray mounted ball launcher. During the semi-finals of the
competition, the robot lost a good portion of its turret mechanism, but finished
anyway by dragging it behind attached only by the control wires as it crossed
the finish line, upsetting Flandroid and moving on to the finals against the
venerable Maverick. The team finished in 3rd place overall, losing only to
Maverick and the undefeated phenom known as Slingshot.
 The Flandroid,
brainchild of Jeff Harrison, Tom Flandro and Scott Suarez incorporated probably
the most unique launching mechanism of all the teams. While not as accurate as
Slingshot's amazing dual ball permi-launch cannon, the gatling gun concept
worked surprisingly well and was a crowd favorite. The rotating turret carried
one ball per barrel and spun on its axis, gatling gun style, to launch each
round. This unique design and a robust line tracking mechanism earned this robot
a 4th place finish in the field of 16.
The Flandroid,
brainchild of Jeff Harrison, Tom Flandro and Scott Suarez incorporated probably
the most unique launching mechanism of all the teams. While not as accurate as
Slingshot's amazing dual ball permi-launch cannon, the gatling gun concept
worked surprisingly well and was a crowd favorite. The rotating turret carried
one ball per barrel and spun on its axis, gatling gun style, to launch each
round. This unique design and a robust line tracking mechanism earned this robot
a 4th place finish in the field of 16.