Active Research Projects
Hybrid Mobility Research
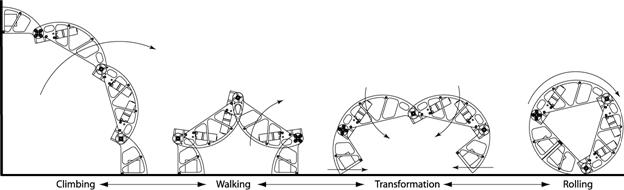
This research investigates mobile robotic systems capable of hybridizing rolling, walking, and climbing locomotion within a single robot with the aim of improving adaptablity, mobility, efficiency and speed. Primary platforms that we have researched include the Rolling Disk Biped (RDB) and the Hex-A-Ball (HAB). Students: Ben Shores (MS), Cris Phipps (MS), Brittany Baker (IGERT intern), Jean-Paul Brice (PhD), Marshall Floyd (IGERT intern).


Autonomous Vehicle Research
As a culmination of our entry into the 2007 DARPA Urban Challenge, we are investigating intelligent self-identifying autonomous vehicles. Research topics include sensing, data fusion, system identification, dynamic control, and motion planning. Students: Ramya Bandaru Andy Hetrick (MS), Zhe Leng (PhD), Jared Roberts (BS), Ming Xin (PhD), Youngshik Kim (postdoc).

Traction Sensing and Control in Wheeled Mobile Robots
Traction control in mobile robots traveling at low speeds is challenging due to the limited ability to measure and control wheel slip at low speeds. Likewise, traction control of mobile robots operating on soft, rugged, or broken terrain is challenging since most traction controllers attempt to maintain bounded wheel slip rather than maximize traction force. In our research we strive to simultaneously sense and control wheel traction while also considering the impact of traction forces distributed on the robot body in order to improve overall tracking capability. Students: Jared Terry (MS), Andy Vogt (PhD)
Immersive Virtual Environments
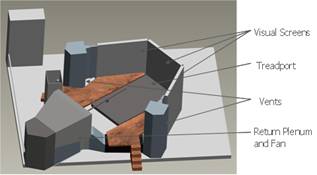
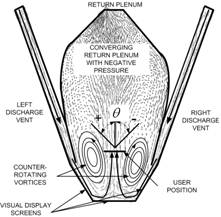
 The TreadPort Active Wind Tunnel (TPAWT) augments the existig TreadPort system with controllable wind, olfactory display, and radiant heat display in order to provide a truly submersive virtual environment. As a user walks on the Sarcos Treadport, the virtual world is displayed on the screeens and an environmental computational fluid dynamics (CFD) model determines the wind and odors the user will experience as they travel through their virtual world. The graphical environment displays artifacts of the wind while the wind generation system creates and controls the wind flow. The wind generation system is essentially an actively controlled wind tunnel that allows wind speed and angle at the user to be regulated (the first of its kind). Development of the wind tunnel and its control algorithms has been a highly iterative process that has involved extensive synergy of numerical (CFD) and experimental techniques (scaled model of TPAWT). We are currently in construction of the final full scale system and hope to be giving demos at the 2009 World Haptics Symposium taking place in Salt Lake City. Students: Sandip Kulkarni (PhD), Charles Fisher (MS), Aditya Desai (MS), Shanthanu Chakravarthy (MS), and Price Lefler (BS/MS).
The TreadPort Active Wind Tunnel (TPAWT) augments the existig TreadPort system with controllable wind, olfactory display, and radiant heat display in order to provide a truly submersive virtual environment. As a user walks on the Sarcos Treadport, the virtual world is displayed on the screeens and an environmental computational fluid dynamics (CFD) model determines the wind and odors the user will experience as they travel through their virtual world. The graphical environment displays artifacts of the wind while the wind generation system creates and controls the wind flow. The wind generation system is essentially an actively controlled wind tunnel that allows wind speed and angle at the user to be regulated (the first of its kind). Development of the wind tunnel and its control algorithms has been a highly iterative process that has involved extensive synergy of numerical (CFD) and experimental techniques (scaled model of TPAWT). We are currently in construction of the final full scale system and hope to be giving demos at the 2009 World Haptics Symposium taking place in Salt Lake City. Students: Sandip Kulkarni (PhD), Charles Fisher (MS), Aditya Desai (MS), Shanthanu Chakravarthy (MS), and Price Lefler (BS/MS).
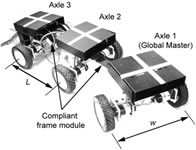
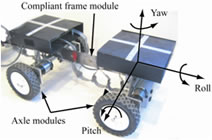
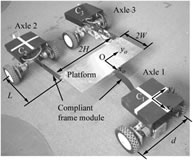
Compliant Framed Modular Mobile Robots (CFMMR)
The CFMMR is a modular robot system consisting of rigid axle modules coupled by compliant frame modules is the subject of this research. Simple modular compliant frame elements provides improved rugged terrain mobility, advanced steering capability, reduced cost, and reconfigurability in order to provide improved adaptability and reconfigurability. Research topics include kinematic motion control, dynamic motion control, sensing and instrumentation, data fusion, and posture estimation. Students: Corey Schwensen (MS), Brian Albistion (MS), Roy Merrel (MS), Xaoirui Zhu (Rachel, PhD), Youngshik Kim (PhD), Sungyong Park, (MS), Andrew Vogt (PhD).
Past Projects
Flying Robots
Our lab has worked with Ornithopters, helicopters, and rockets via senior design projects and industry sponsored projects. Following is brief description of the ornipthopter research.
Ornithopters are essentially bird like aircraft that use flapping wings to provide propulsion instead of propellers. They are well suited to flying at low speeds near people. Our research focused on controls and instrumentation in order to provide inertial based navigation whereas the senior design team (consisting largley of the same students) focused on aerodynamics. Students: Katie Shigeoka (MS), Jared Terry (MS), Charles Fisher (MS), and Eric Johnson (PhD with S. Bamberg).

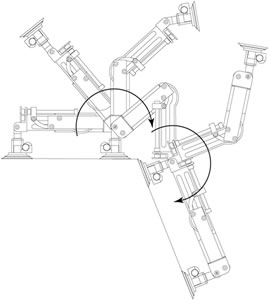
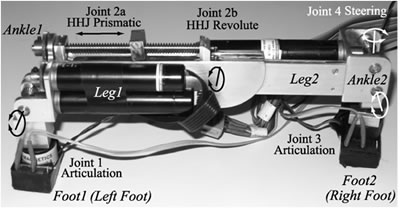
Hybrid Hip Climbing Robots
Miniature Climbing robots are extremely limited in terms of weight capacity. Since actuators are a major portion of a climbing robot's weight, we strived to increase robot adaptability by allowing a single actuator to drive multiple joints. The resulting robot has five joints powered by three actuators, which allows the robot to access confined locations while also being able to climb over obstacles. The resulting Hybrid Hip Joint (HHJ) climbing robot is shown below. Students: Satya Krosuri (MS), Jake Scott (BS).
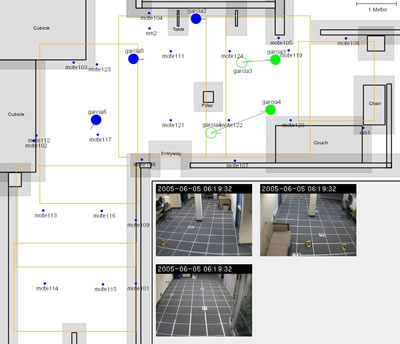
Mobile Robot Wireless Network Testbed
A mobile robotic testbed for positioning wireless network devices is developed in this research. The system is an extension of the Emulab internet simulation environment designed to provide wireless network researchers the ability to arbitrarily position wireless devices in a office environment. Unique challenges to this research include teleoperation of mobile robots with limited available on board resources. Students: Dan Flickinger (MS).